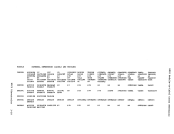
r DIAGNOSE Code 0008 oooe 0014 0020 0024 005C IIssued by
FunctionIModule(s) Executes a CP command. DETAXS Gets the current time
and date.
Manipulates input spool
files.Perforas general I/O without interrupt.
Determines virtual de
vicetYFe information.
Edits error messages.DETREX DMTCEX DfiTriGX DETSML DMTNPT D8TS8L D8'INPT DPJTAXS DHTSHL DMTNPT DMTINI DHTREX DETLAX DMTSML DHTREX Figure 3. V8/310 DIAGNOSE Instructions Issued ty the Rses Program The supervisor provides only those functions that cannot be
consistently
provides only the support necessary to control and coordinate the
execution of the tasks.
InRSCS, a task is a single program or set of subprograms that can
run concurrently and autono.ously with other suchprograms and subprcgrams, and which uses control functions provided by the
Supervisor.
There are twosystem service tasks and line driver
tasks. The system service tasks are those that provide the systemsUFport functions for the supervisor and for other tasks. The line
driver tasks are these that manage the transmission paths to remote
stations and that interact between the remote stations and the system
service tasks and the Supervisor. Each line driver task manages tbe
transmission of files to andfrom a single remote station.
Figures 12 and 13 inSection 2 show the communications paths tetween the supervisor, system service tasks, line driver tasks, remote
stations, andV8/310 virtual machines.
TheRSCS Supervisor
The Rses supervisor is composed of a set of service routines that
provide functions for the tasks that run under them. These service
routines may be called by any task. In general, they provide four kinds
of services:• Task management • I/O management • Interrupt handling • Virtual storage management
3-8IBM V8/310: System Logic and Problem Determination--Volume 3
Function
and date.
Manipulates input spool
files.
Determines virtual de
vice
Edits error messages.
consistently
provides only the support necessary to control and coordinate the
execution of the tasks.
In
run concurrently and autono.ously with other such
Supervisor.
There are two
tasks. The system service tasks are those that provide the system
driver tasks are these that manage the transmission paths to remote
stations and that interact between the remote stations and the system
service tasks and the Supervisor. Each line driver task manages tbe
transmission of files to and
Figures 12 and 13 in
stations, and
The
The Rses supervisor is composed of a set of service routines that
provide functions for the tasks that run under them. These service
routines may be called by any task. In general, they provide four kinds
of services:
3-8