123
even�a�logarithmic�time�search�for�each�deletion�found.�In�the�worst�case,�many�intervals
may�have�to�be�examined�without�even�necessarily�advancing�in�the�sequence.
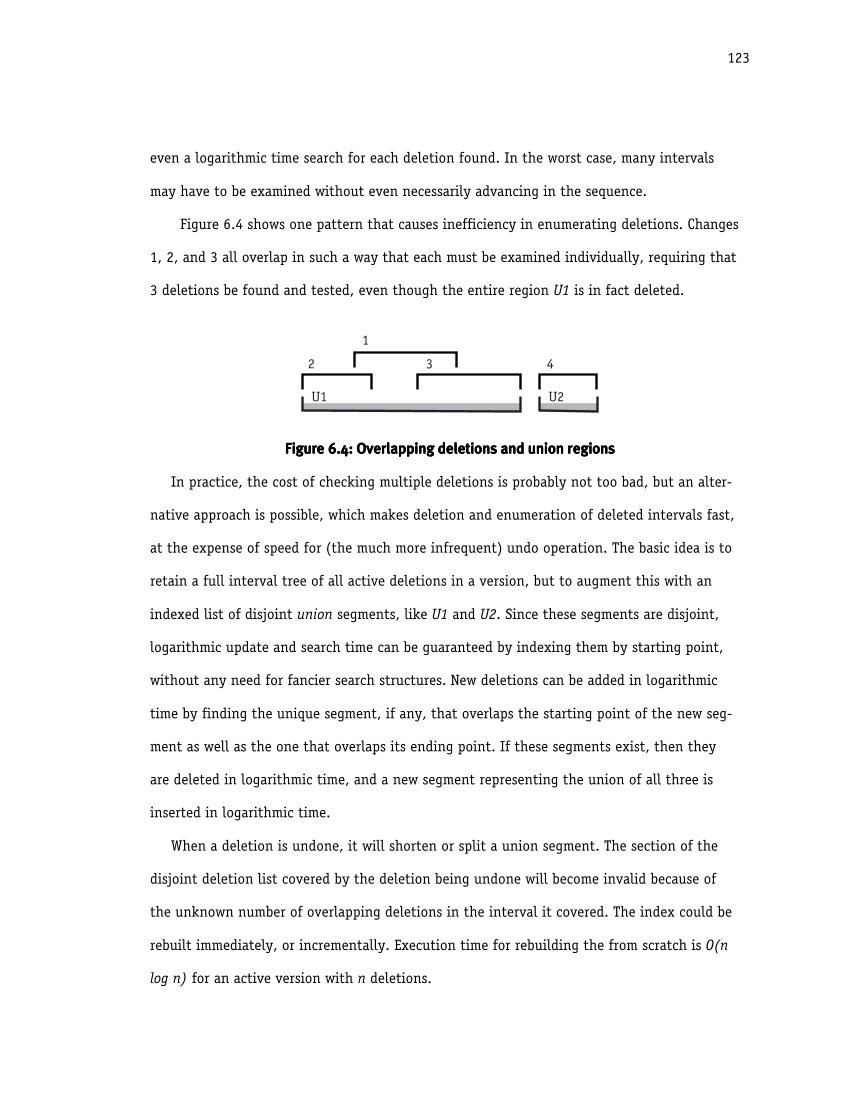
Figure�6.4�shows�one�pattern�that�causes�inefficiency�in�enumerating�deletions.�Changes
1,�2,�and�3�all�overlap�in�such�a�way�that�each�must�be�examined�individually,�requiring�that
3�deletions�be�found�and�tested,�even�though�the�entire�region�U1is�in�fact�deleted.
1
234
U1 U2
F F F F iii ig g g gu u u ur r r re e e e 6666....4444:::: OOOOvvvveeeerrrrllllaaaappppppppiiiinnnngggg ddddeeeelllleeeettttiiiioooonnnnssss aaaannnndddd uuuunnnniiiioooonnnn rrrreeeeggggiiiioooonnnnssss
In�practice,�the�cost�of�checking�multiple�deletions�is�probably�not�too�bad,�but�an�alter-
native�approach�is�possible,�which�makes�deletion�and�enumeration�of�deleted�intervals�fast,
at�the�expense�of�speed�for�(the�much�more�infrequent)�undo�operation.�The�basic�idea�is�to
retain�a�full�interval�tree�of�all�active�deletions�in�a�version,�but�to�augment�this�with�an
indexed�list�of�disjoint�unionsegments,�likeU1andU2.�Since�these�segments�are�disjoint,
logarithmic�update�and�search�time�can�be�guaranteed�by�indexing�them�by�starting�point,
without�any�need�for�fancier�search�structures.�New�deletions�can�be�added�in�logarithmic
time�by�finding�the�unique�segment,�if�any,�that�overlaps�the�starting�point�of�the�new�seg-
ment�as�well�as�the�one�that�overlaps�its�ending�point.�If�these�segments�exist,�then�they
are�deleted�in�logarithmic�time,�and�a�new�segment�representing�the�union�of�all�three�is
inserted�in�logarithmic�time.
When�a�deletion�is�undone,�it�will�shorten�or�split�a�union�segment.�The�section�of�the
disjoint�deletion�list�covered�by�the�deletion�being�undone�will�become�invalid�because�of
the�unknown�number�of�overlapping�deletions�in�the�interval�it�covered.�The�index�could�be
rebuilt�immediately,�or�incrementally.�Execution�time�for�rebuilding�the�from�scratch�is�O(n
log�n)for�an�active�version�withndeletions.
even�a�logarithmic�time�search�for�each�deletion�found.�In�the�worst�case,�many�intervals
may�have�to�be�examined�without�even�necessarily�advancing�in�the�sequence.
Figure�6.4�shows�one�pattern�that�causes�inefficiency�in�enumerating�deletions.�Changes
1,�2,�and�3�all�overlap�in�such�a�way�that�each�must�be�examined�individually,�requiring�that
3�deletions�be�found�and�tested,�even�though�the�entire�region�U1is�in�fact�deleted.
1
234
U1 U2
F F F F iii ig g g gu u u ur r r re e e e 6666....4444:::: OOOOvvvveeeerrrrllllaaaappppppppiiiinnnngggg ddddeeeelllleeeettttiiiioooonnnnssss aaaannnndddd uuuunnnniiiioooonnnn rrrreeeeggggiiiioooonnnnssss
In�practice,�the�cost�of�checking�multiple�deletions�is�probably�not�too�bad,�but�an�alter-
native�approach�is�possible,�which�makes�deletion�and�enumeration�of�deleted�intervals�fast,
at�the�expense�of�speed�for�(the�much�more�infrequent)�undo�operation.�The�basic�idea�is�to
retain�a�full�interval�tree�of�all�active�deletions�in�a�version,�but�to�augment�this�with�an
indexed�list�of�disjoint�unionsegments,�likeU1andU2.�Since�these�segments�are�disjoint,
logarithmic�update�and�search�time�can�be�guaranteed�by�indexing�them�by�starting�point,
without�any�need�for�fancier�search�structures.�New�deletions�can�be�added�in�logarithmic
time�by�finding�the�unique�segment,�if�any,�that�overlaps�the�starting�point�of�the�new�seg-
ment�as�well�as�the�one�that�overlaps�its�ending�point.�If�these�segments�exist,�then�they
are�deleted�in�logarithmic�time,�and�a�new�segment�representing�the�union�of�all�three�is
inserted�in�logarithmic�time.
When�a�deletion�is�undone,�it�will�shorten�or�split�a�union�segment.�The�section�of�the
disjoint�deletion�list�covered�by�the�deletion�being�undone�will�become�invalid�because�of
the�unknown�number�of�overlapping�deletions�in�the�interval�it�covered.�The�index�could�be
rebuilt�immediately,�or�incrementally.�Execution�time�for�rebuilding�the�from�scratch�is�O(n
log�n)for�an�active�version�withndeletions.